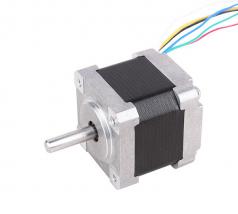
Nema14 35HM 2 phase 0.9° hybrid stepper motor









The hybrid linear stepper motor sometimes is out of step. With the use of stepper motor so many years of experience, the stepper motor is not as bad as imagined, unless the driver developer is really not the level.

Because the stepper motor is well used, the servo motor is not easy to use. The advantages of the hybrid linear stepper motor are simple programming, less wiring, fewer faults, and large torque. The current hybrid linear stepper motor can reach 60000 pulses at the maximum, which is enough precision. Some of them can reach 3000 rpm, which can reach 600 revolutions generally.
The stepper motor can reach 600 revolutions in general. Generally, the machine can turn to 500 revolutions, but it is also very fast. If it is fast, it may stop rotating. The motor will make a sound like stuck. This is that the speed is too high, and the motor can not turn. The solutions of hybrid linear stepper motor out of step are 1. Reduce the maximum operating frequency. 2. Adjust the time of high speed and acceleration and deceleration. 3. Reduce the starting frequency. 4. Adjust the fine score to a gear.
The speed of the stepper motor is inversely proportional to the torque. The faster the speed is, the smaller the torque is. Of course, it is very important when selecting the model, not in the small horse-drawn cart. It doesn't matter if the model is bigger, it is really not possible to select small or just. The motor is too small to lose a step, and the machinery is too heavy, which causes the phenomenon of a small horse pulling cart.
Generally, the driving signal pulse is mostly a 24V series 2K resistor. The resistance recommended by general manufacturers is 1.8k-2k. Actually, I measured that when 2K resistance was applied, the pulse voltage was only 2.2V. Later I chose a 1.5k resistor. This problem is obtained by practice, and there is also a motor that is not smooth. I found no reason in many places, and then I changed a resistance. Generally, the optocoupler can withstand 24V, especially when there is no resistance, it can be directly connected to it. Of course, it's better to have a resistor.
Many people say that the hybrid linear stepper motor is out of step, in fact, there are many mechanical reasons. The screw rod bearing is not installed well, the screw rod is worn, and the guide rail wear can make the machine go wrong. The quality of the origin switch directly affects the accuracy.
I have encountered the phenomenon of contention in the program I wrote. Maybe it is a technical problem. After the processing is completed, the program can sometimes run the processing program back and forth in place, and the program back to the origin is not connected. This directly causes the cumulative error, and then it is discovered through long-term monitoring. This happens in the machine which is divided by cloth.
If the hybrid linear stepper motor is inertia due to excessive load, it is more than walking through the head. The jog command is not correct, especially when it is used to return to the origin. That is a great mistake. The point action is a complete 90-degree right angle, starting and stopping is equivalent to the emergency brake, and it can not be stopped when thinking about it. So it is necessary to use the return to origin instruction.
Motor current should not be adjusted to rated current. Generally, if the motor is in a small gear, if rated 6a, it is OK to adjust to 5.5A. The torque is enough at this time, and the temperature is not very high. Although the stepper motor can reach 80 degrees, the temperature is too high, which still affects the magnetic field.











View More(Total0)Comment Lists