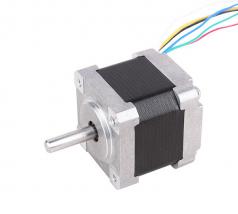
Nema14 35HM 2 phase 0.9° hybrid stepper motor









1. Because of the characteristics of NEMA 23 hybrid stepper motor, there must be heating phenomenon, so it is important to understand the heating phenomenon in the sales process of NEMA 23 hybrid stepper motor. It is necessary to correctly understand the temperature range of stepper motor and the relationship between the insulation grade of stepper motor and the temperature rise specification of motor.

NEMA 23 hybrid stepper motor in the process of use, the temperature does not always rise and do not stop, in the stepper motor temperature rise saturation will maintain a constant value. Under the condition of different driving frequency, the temperature rise of NEMA 23 hybrid stepper motor is different. If the temperature of stepper motor is too high, the magnetic material of the motor will be demagnetized, which will lead to the decrease of torque and even out of step; Generally speaking, the demagnetization point of magnetic materials is above 130 ℃, some even as high as 200 ℃, so the surface temperature of stepping motor is 80-90 ℃
2. When the stepping motor rotates at a low speed, the vibration and noise are its inherent shortcomings, which can be overcome by the following solutions
(1). If the stepping motor just works in the resonance area, it can avoid the resonance area by changing the speed reduction ratio and other mechanical transmission
(2). The driver with subdivision function is the most common and simple method;
(3). Change to the stepping motor with smaller step angle, such as three-phase or five phase stepping motor;
(4). The AC servo motor can almost completely overcome the vibration and noise, but the cost is high;
(5). The magnetic damper is added to the motor shaft. This kind of product is available in the market, but the mechanical structure has changed greatly

3. Out of tune
The NEMA 23 hybrid stepper motor can work normally at low speed, but if it is higher than a certain speed, it can not start and accompanied by whistling. This is because the NEMA 23 hybrid stepper motor has a technical parameter: no-load starting frequency, that is, the pulse frequency at which the stepper motor can start normally under no-load condition. If the pulse frequency is higher than this value, the motor can not start normally, and step loss or locked rotor may occur. In the case of load, the starting frequency should be lower. If the motor is to rotate at a high speed, the pulse frequency should have an acceleration process, that is, the starting frequency should be low, and then it should rise to the desired high frequency according to the fixed acceleration (the motor speed rises from low to high speed).
4. Motor reversal
Countermeasures: just switch a + and a - (or B + and B -) of motor and driver wiring
5. Installation and use
The installation mode, positioning surface, the size of the hole used by customers and the output mode of motor torque (pulley, gear, etc.) should be inquired.











View More(Total0)Comment Lists