
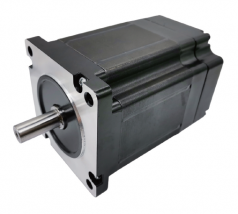
42mm brushless dc motor









NEMA brushless dc motor (BLDC) can be imagined as the opposite of brush DC motor, in which the permanent magnet is on the rotor and the winding is on the stator. Therefore, the motor has no brush and commutator, eliminating the disadvantage related to the spark of brush DC motor.
The motor is called DC motor because its coil is driven by DC power supply, which is applied to different stator coils in a predetermined order. This process is called commutation. However, NEMA brushless dc motor is not appropriate because the motor is actually an AC motor. During the circuit cycle, the current in each coil alternates between positive and negative. Generally, the stator is a salient pole structure, which aims to generate trapezoidal back EMF waveform, which conforms to the applied commutation voltage waveform as much as possible. However, it is difficult to do so in practice. The waveform of back EMF is usually more like sine than trapezoid. Therefore, many control technologies used in PMSM (such as field oriented control) are also suitable for NEMA brushless dc motor.
Another misunderstanding about NEMA brushless dc motor is how to drive it. It is different from the stator coil driven in open loop stepping application
In NEMA brushless dc motor, the rotor position determines which stator coil to drive. The stator flux vector position must be synchronized with the rotor flux vector position (not the opposite) to make the motor operate smoothly. To achieve this goal, it is necessary to know the rotor position to determine the stator coil to be driven. A variety of existing technologies can achieve this goal, but the most commonly used technology is to use Hall effect sensor to monitor the rotor position. Unfortunately, these sensors and their associated connectors and wiring harness will add to the system

Cost and reduce reliability.
In order to reduce these problems, a variety of technologies have been developed to eliminate these sensors and realize sensorless operation. Most of the techniques rely on extracting the position information from the back EMF waveform of the stator winding when the motor is rotating. However, the back EMF sensing technology is useless when the motor rotates slowly or is stationary, because the back EMF waveform is very weak or does not exist at all. Therefore, we continue to develop new technologies to obtain rotor position information from other signals at low or zero speed.
NEMA brushless dc motor has an absolute advantage in efficiency rating, which can reach about 95%. At present, the research of new amorphous alloy materials is pushing this number to a new high. It has been reported that the efficiency is 96% in the range of 100W. NEMA brushless dc motors are still competing for the title of "the fastest motor in the world". Some motors can reach hundreds of thousands of RPM (400k RPM has been reported in one application)
The most commonly used NEMA brushless dc motor topology uses three-phase stator structure. Therefore, the standard 6-transistor reverser is the most commonly used power stage, as shown in. According to the operation requirements (sensor and sensorless, commutation and sinusoidal, PWM and SVM, etc.), there are many different methods to drive the transistor to achieve the desired goal, which are not listed here. This requires the flexibility of the PWM generator in the microcontroller.










View More(Total0)Comment Lists